はじめに
「モーターを速く動かそうとすると、ガガガと異音がして止まってしまう……」
これは「脱調」と呼ばれる現象で、静止状態からいきなり高速で回そうとすることが原因です。自作XYテーブルを実用的なスピードで、かつ正確に動かすためには、速度を徐々に変化させる「加減速制御」が欠かせません。
今回は、Pythonを使って「台形駆動(スローアップ・スローダウン)」を実装する方法を解説します。このアルゴリズムをマスターして、あなたの装置をワンランク上の滑らかな動きへと進化させましょう!
加減速の仕組みと「待ち時間」のコントロール
前ステッピングモーターを滑らかに動かす「台形駆動」
停止しているモーターをいきなり高速で回そうとすると、負荷に耐えきれず「脱調(空回り)」して止まってしまいます。これを防ぐために、以下の3つのフェーズに分けて速度を制御します。これを**「台形駆動(速度プロファイル)」**と呼びます。
- 加速区間(スローアップ): 徐々に速度を上げる
- 定速区間: 目標の最高速度で維持する
- 減速区間(スローダウン): 停止に向けて徐々に速度を落とす
台形駆動(速度プロファイル)のイメージ
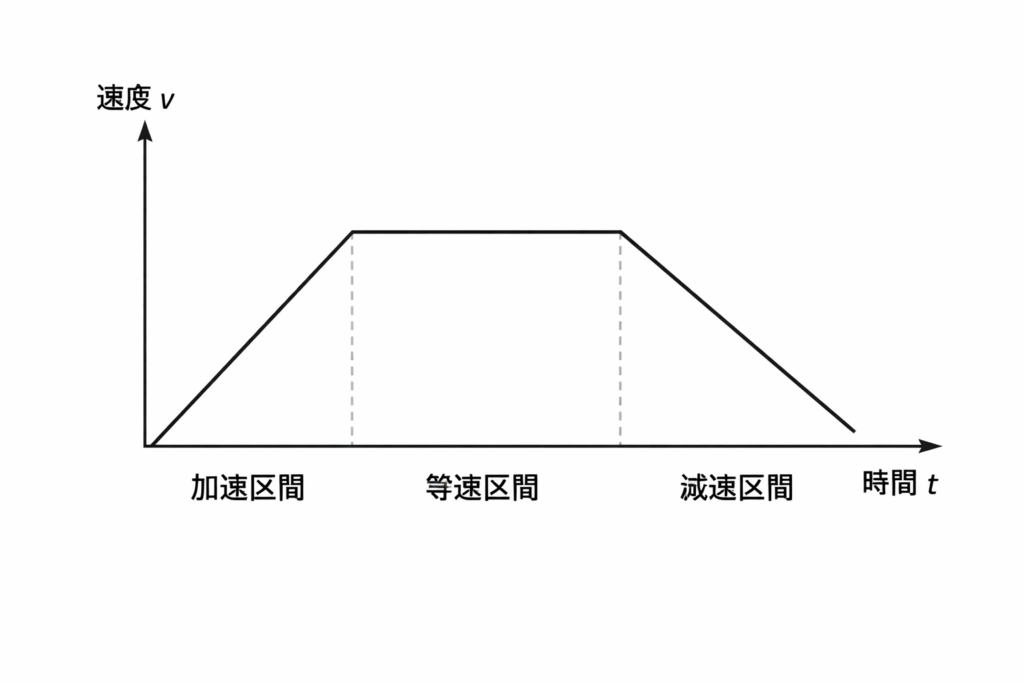
ステッピングモーターを滑らかに動かす「台形駆動」イメージ
今回作る関数
この制御を実現するために、ステップごとの**「待ち時間(interval)」**を計算する関数 get_intervals() を作成します。
get_intervals()
Pythonの time.sleep(interval) で使うこの値は、**「数値が小さくなるほど、モーターは速く回る」**という性質があります。
例
| フェーズ | 待ち時間(例) | モーターの状態 |
| 加速 | 0.005 → 0.003 → 0.001 | どんどん速くなる |
| 低速 | 0.001 (一定) | 一定の速さで回る |
| 減速 | 0.001 → 0.003 → 0.005 | どんどん遅くなる |
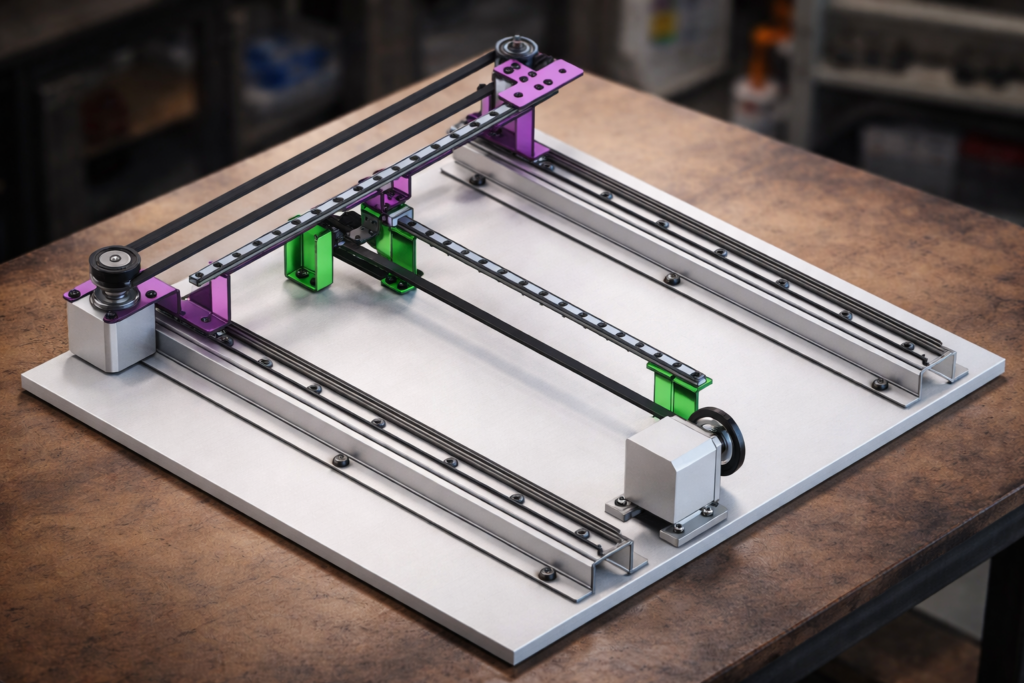
使用するハードウェアと配線について
「【第4回】XYテーブル化の第一歩|X軸とY軸を2台同時に動かす」と
同じハードウェア構成、配線にて行います
Pythonプログラム
X軸のみの実装になります
Y軸は今回の記事では動作させません。
import RPi.GPIO as GPIO
import time
# =====================================================
# GPIO モード設定
# =====================================================
GPIO.setmode(GPIO.BCM)
# ===== PIN設定 =====
X_STEP = 21
X_DIR = 20
X_EN = 16
X_MS1 = 17
X_MS2 = 27
X_MS3 = 22
X_RESET = 5
X_SLEEP = 6
# =====================================================
# モーション設定(将来互換)
# =====================================================
BELT_PITCH = 2.0
PULLEY_TEETH = 32
FULL_STEPS_PER_REV = 200
MICROSTEP = 16
MM_PER_REV = BELT_PITCH * PULLEY_TEETH
STEPS_PER_REV = FULL_STEPS_PER_REV * MICROSTEP
MM_PER_STEP = MM_PER_REV / STEPS_PER_REV
# =====================================================
# GPIO 初期化関数(rev4互換)
# =====================================================
def gpio_init_axis(STEP, DIR, EN, MS1, MS2, MS3, RESET, SLEEP):
pins = [STEP, DIR, EN, MS1, MS2, MS3, RESET, SLEEP]
for pin in pins:
GPIO.setup(pin, GPIO.OUT)
GPIO.output(RESET, GPIO.HIGH)
GPIO.output(SLEEP, GPIO.HIGH)
GPIO.output(EN, GPIO.LOW)
# 1/16 マイクロステップ
GPIO.output(MS1, GPIO.HIGH)
GPIO.output(MS2, GPIO.HIGH)
GPIO.output(MS3, GPIO.HIGH)
# ===== 加減速プロファイル作成 =====
def get_intervals(total_steps):
min_delay = 0.003 # 最高速
max_delay = 0.009 # 最低速
accel_steps = total_steps // 3
decel_steps = accel_steps
const_steps = total_steps - accel_steps - decel_steps
intervals = []
# 加速
for i in range(accel_steps):
ratio = i / accel_steps
delay = max_delay - (max_delay - min_delay) * ratio
intervals.append(delay)
# 定速
for i in range(const_steps):
intervals.append(min_delay)
# 減速
for i in range(decel_steps):
ratio = i / decel_steps
delay = min_delay + (max_delay - min_delay) * ratio
intervals.append(delay)
return intervals
# ===== 移動関数(加減速付き) =====
def move_mm(distance_mm, direction):
steps = int(distance_mm / MM_PER_STEP)
GPIO.output(X_DIR, direction)
intervals = get_intervals(steps)
for delay in intervals:
GPIO.output(X_STEP, GPIO.LOW)
time.sleep(delay)
GPIO.output(X_STEP, GPIO.HIGH)
time.sleep(delay)
try:
print("50mm 正転(加速 → 定速 → 減速)")
move_mm(50, GPIO.LOW)
time.sleep(1)
print("50mm 逆転(加速 → 定速 → 減速)")
move_mm(50, GPIO.HIGH)
finally:
GPIO.cleanup()
この記事で使用したコードはこちらからダウンロードできます。
X_Move_acc_dec.py をダウンロード(ZIP)プログラムのポイント
get_intervals()
この関数が加減速の核心です。
delay = max_delay - (max_delay - min_delay) * ratio
delay = min_delay + (max_delay - min_delay) * ratio
ratioを使って徐々に待ち時間を短くしています。
実行するとどうなる?
モーターの動きが次のように変わります。
以前
一定速度
ガガガガガガ
今回
ゆっくり → 速く → ゆっくり
動きがかなり滑らかになります。
XYテーブル製作シリーズの現在地
現在のシリーズの進行状況です。
| 回 | 内容 |
|---|---|
| 第1回 | LEDを光らせる |
| 第2回 | モーターを回す |
| 第3回 | A4988でモーター制御 |
| 第4回 | XYの2軸制御 |
| 第5回 | 加減速制御 ← 今回 |
次回予告
次回はいよいよ
XY同時制御(直線補間)
を実装します。
これができると
斜め移動
円弧
図形描画
などが可能になります。
XYテーブル制御の核心部分です。
【第6回】Raspberry PiでXYテーブル制御|Pythonでステッピングモーターを2軸同時に動かす(XYテーブル製作シリーズ)
過去のXYテーブル製作シリーズはこちらから
- 【第0回】Raspberry PiのOSインストール完全ガイド|初心者向けにゼロから解説
- 【第1回】PythonでLEDを光らせる|GPIOの基本をやさしく解説
- 【第2回】ラズパイ+A4988でステッピングモーターを回す
- 【第3回】ステッピングモーターをmm単位で動かす|ベルト駆動の計算方法まで解説
- 【第1.5回】 A4988のVref調整手順(XYテーブル製作シリーズ)
- 【番外編】L6470が動かない?A4988と同じ感覚で使ってハマった話
- 【第4回】XYテーブル化の第一歩|X軸とY軸を2台動かす
- 【第5回】Pythonでステッピングモーターの加減速制御を実装する
- 【第6回】Pythonでステッピングモーターを2軸同時に動かす
- 【第7回】Raspberry PiでXYテーブル制御|リミットスイッチと原点復帰(Homing)の実装
- 【第8回】【Python × Raspberry Pi】XYテーブルをGUI操作する(Tkinter)
コメント