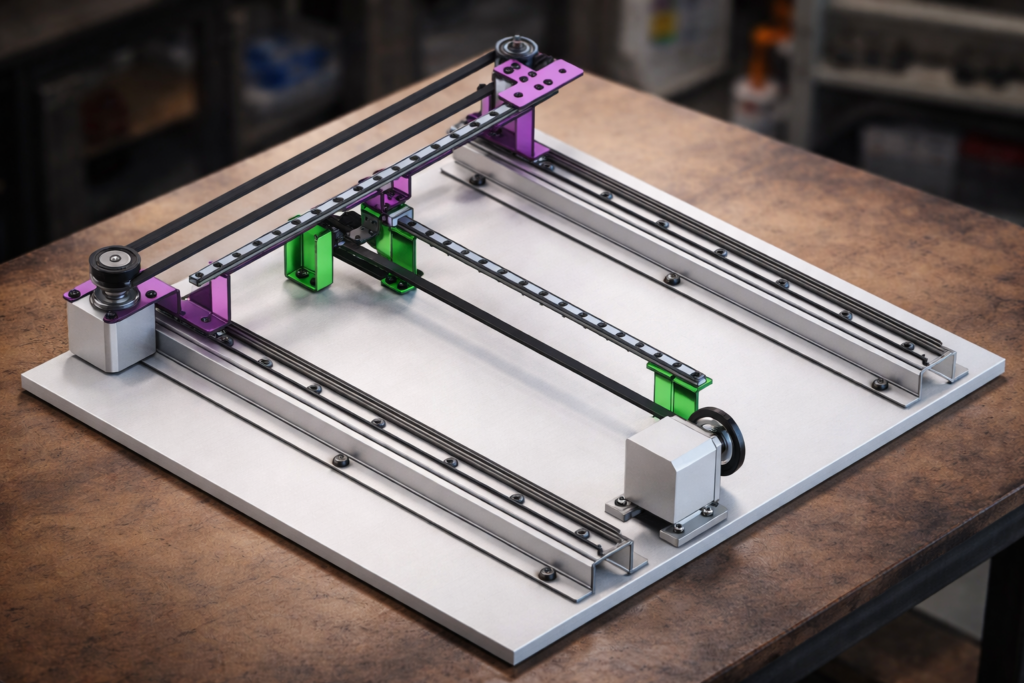
完成イメージ(ゴール)
ターゲット読者
- 電子工作初心者: ラズパイのOS設定から始めたい方
- Python勉強中の方:コードを書いて実際にモノを動かす楽しさを知りたい方
- 機構系の技術者:実務レベルの装置制御(安全設計や座標管理)を学びたい方
この記事は、全12回の連載記事を整理し、あなたが迷わず完成まで辿り着くための「ロードマップ」です。
はじめに:独学で「動く装置」を形にしたいあなたへ
「Raspberry Pi(ラズパイ)で何か動くものを作ってみたい」「Pythonを使ってハードウェアを制御したい」……そう思ったことはありませんか?
本記事では、これまで当ブログで連載してきた**「XYテーブル製作シリーズ」**の全行程を1つに凝縮。全体像から目的別の読み方、製作の重要ポイントまで網羅的に解説します。
「結局どこから読めばいいの?」「完成すると何ができるようになるの?」という疑問を、この記事1本でスッキリ解消します!
このシリーズで実現できること
この連載を読み進めることで、最終的に「実用レベルのXYテーブル装置」をゼロから構築するスキルが身につきます。
- 精密な動き: ステッピングモーターによる「mm単位」の高精度な位置決め。
- 高度な制御: 2軸(X・Y)の同時同期、滑らかな加減速制御。
- 確実な運用: 原点復帰(ホーミング)と現在位置のリアルタイム管理。
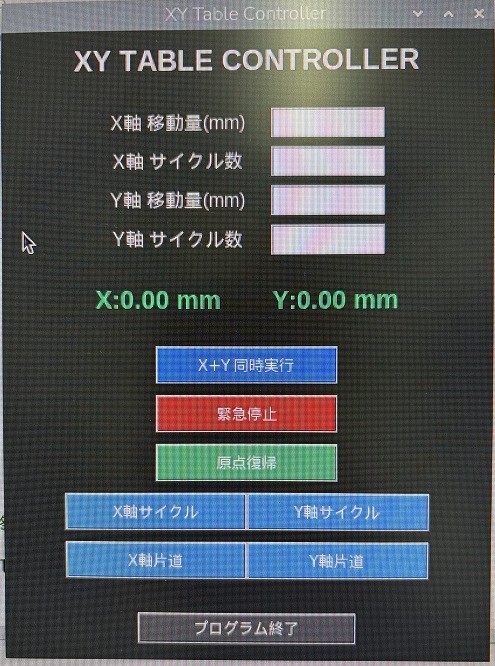
- 使いやすさ: プログラミング知識がない人でも扱える「GUI(操作画面)」の実装。
単なる「実験」で終わらせず、装置として完成させることをゴールに設定しています。
製作ロードマップ:4つのフェーズ
全12回の工程を、学習の段階に合わせて4つのブロックに分けました。
【Phase 1】準備と基礎(第0回〜第1回)
まずは土台作りです。ラズパイを起動し、プログラムで「電気」を操る基本を学びます。
- [第0回] Raspberry Pi OSのインストール:全ての始まり。開発環境を整えます。
- [第1回] GPIOの基本操作:LED点滅(Lチカ)などを通じて、ピン制御の基礎を理解します。
【Phase 2】モーターを思い通りに動かす(第2回〜第4回)
いよいよ物理的な「動き」を作ります。
- [第2回] ステッピングモーターを回す:A4988等のドライバを使い、モーターを回転させます。
- [第3回] 「mm単位」で動かす制御手法:パルス数と移動距離の計算方法を詳しく解説。
- [第4回] ハードウェアの組み立てとXYテーブル化:機構を組み上げ、実機としての形を作ります。
【Phase 3】高度な制御ロジック(第5回〜第7回)
「ただ動く」から「実用レベルの装置」へと進化させます。
- [第5回] 滑らかな動きを実現する加減速制御:脱調を防ぎ、機械を優しく、かつ速く動かします。
- [第6回] 2軸同時制御(直線補間):XとYを同期させ、斜め移動などの自由な軌道を作ります。
- [第7回] 原点復帰(ホーミング):リミットスイッチを使い、装置の「基準点」を自動で確定させます。
【Phase 4】GUIアプリ化と完成(第8回〜第11回)
誰でも使える「製品」としてのインターフェースを整えます。
- [第8回・第10回] TkinterによるGUI操作パネル作成:ボタン一つで動かせる操作画面を実装。
- [第9回] 現在地を見失わない座標管理:ソフトウェア側で常に座標を保持し、精密な運用を可能にします。
- [第11回] 完成構成と設計資料:【保存版】全体の配線図やソースコードのまとめです。
このシリーズの「こだわり」ポイント
他の入門ブログにはない、当ブログならではの強みを紹介します。
- 「安全第一」のコード設計:GUIを閉じた時やプログラムが異常終了した際に、モーターが暴走せず正しく停止するための処理(スレッド管理など)を徹底解説しています。
- 数学を実用的なコードに落とし込む:「なぜこの計算が必要なのか?」という理屈を大切にしています。mm単位の計算や加減速のロジックを、初心者でも納得できる言葉で解説しました。
必要なパーツ・工具リスト
製作に必要な主要パーツをまとめました。各記事を巡らなくても、ここから揃えられます。
最後に
装置づくりは、一つひとつの積み重ねです。最初はモーターが1ミリ動くだけでも、それは大きな前歩。一歩ずつ進めば、必ずあなただけのXYテーブルが完成します。
まずは**「第0回」**から、ものづくりの第一歩を踏み出しましょう!
シリーズ記事一覧
電子工作・自動化ツールの製作記録をシリーズごとにまとめています。気になるテーマからお読みください。
-
FILE.01 — IoT
 Raspberry Pi Pico W × GAS
Raspberry Pi Pico W × GASラズパイPico W×GASで自作!「LINEで動く温湿度&スマートリモコン」完全ロードマップ
「外出中のペットの室温が心配…」そんな思いからスタートしたIoT自作プロジェクトの総集編。温湿度監視からエアコン遠隔操作まで、仕組みをゼロから作りたい方のための全5回の開発記録です。
シリーズを読む -
FILE.02 — CNC
 Arduino × レーザー刻印CNC
Arduino × レーザー刻印CNCCNC自作シリーズ
高精度な加工を目指し、本格的な自作CNC製作に挑戦中。現在は基幹パーツであるオリエンタルモーターの納品を待つ「設計・準備編」を公開。ハードとソフトの両面から、理想のマシンを形にする過程をリアルタイムにお届けします。
シリーズを読む -
FILE.03 — XY軸制御
 Raspberry Pi × ステッピングモーター
Raspberry Pi × ステッピングモーターXYテーブルシリーズ
Raspberry Piとステッパモーターを使い、ゼロから2軸制御に挑む記録。OS設定から回路設計、多軸制御のPythonコードまで、躓きやすいポイントを徹底図解。電子工作初心者が「動く感動」を味わうための実戦ガイドです。
シリーズを読む -
FILE.04 — 業務自動化
 Python × Excel × CustomTkinter
Python × Excel × CustomTkinter【Python開発記】NINJIN Mail制作記
PythonとExcelを連携させ、実務で即戦力となるメール送信ツールを開発。CustomTkinterによるUI構築や、ミスを防ぐテンプレート活用術など、現場の「痒い所に手が届く」自動化ノウハウを細部まで丁寧に解説します。
シリーズを読む -
FILE.05 — 業務自動化
 Python × Excel × GUIアプリ化
Python × Excel × GUIアプリ化Invoice Maker(請求書・見積書自動作成)
手作業の請求書作成から卒業!PythonでExcelデータを読み込み一括PDF化する「Invoice_Maker」の作り方を全3回で解説。基本ロジックからGUIアプリ化まで、実務で役立つ自動化ノウハウが満載です。
シリーズを読む





コメント