はじめに
この記事では XYテーブルの2軸を同時に動かす方法 を解説します。
前回の記事では
・X軸単体
・Y軸単体
を動かしました。
しかしXYテーブルでは
・XとYを同時に動かす
・斜め移動などを実現する
必要があります。
そこで今回は Pythonのスレッド(threading) を使って
2つのモーターを同時に動作させる方法 を解説します。
今回のゴール
今回のプログラムで出来ること
X軸 → 50mm
Y軸 → 30mm
X軸とY軸を同時に動作させる
つまり
斜め移動ができる
が実現できます
これは XYテーブル制御の基本動作 になります。
ハードウェア構成
今回使用する部品は以下です。
| 部品 | 型番 |
|---|---|
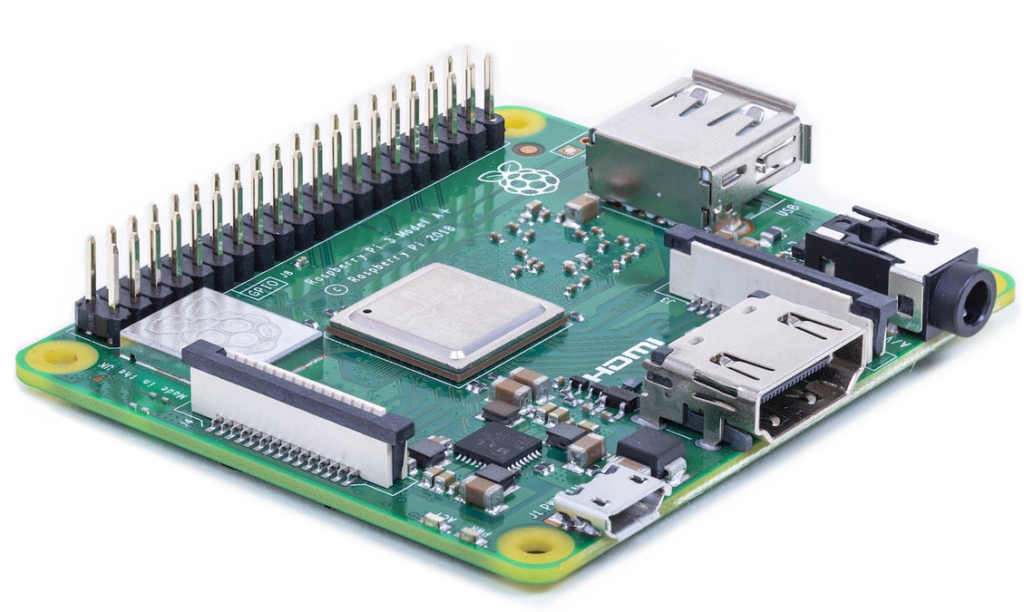
| マイコン | Raspberry Pi 3 Model A+ |
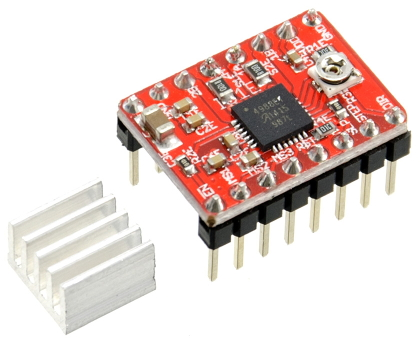
| モータードライバ | A4988 |
| モーター | Nema17 |
| 電源 | 12V 5A |


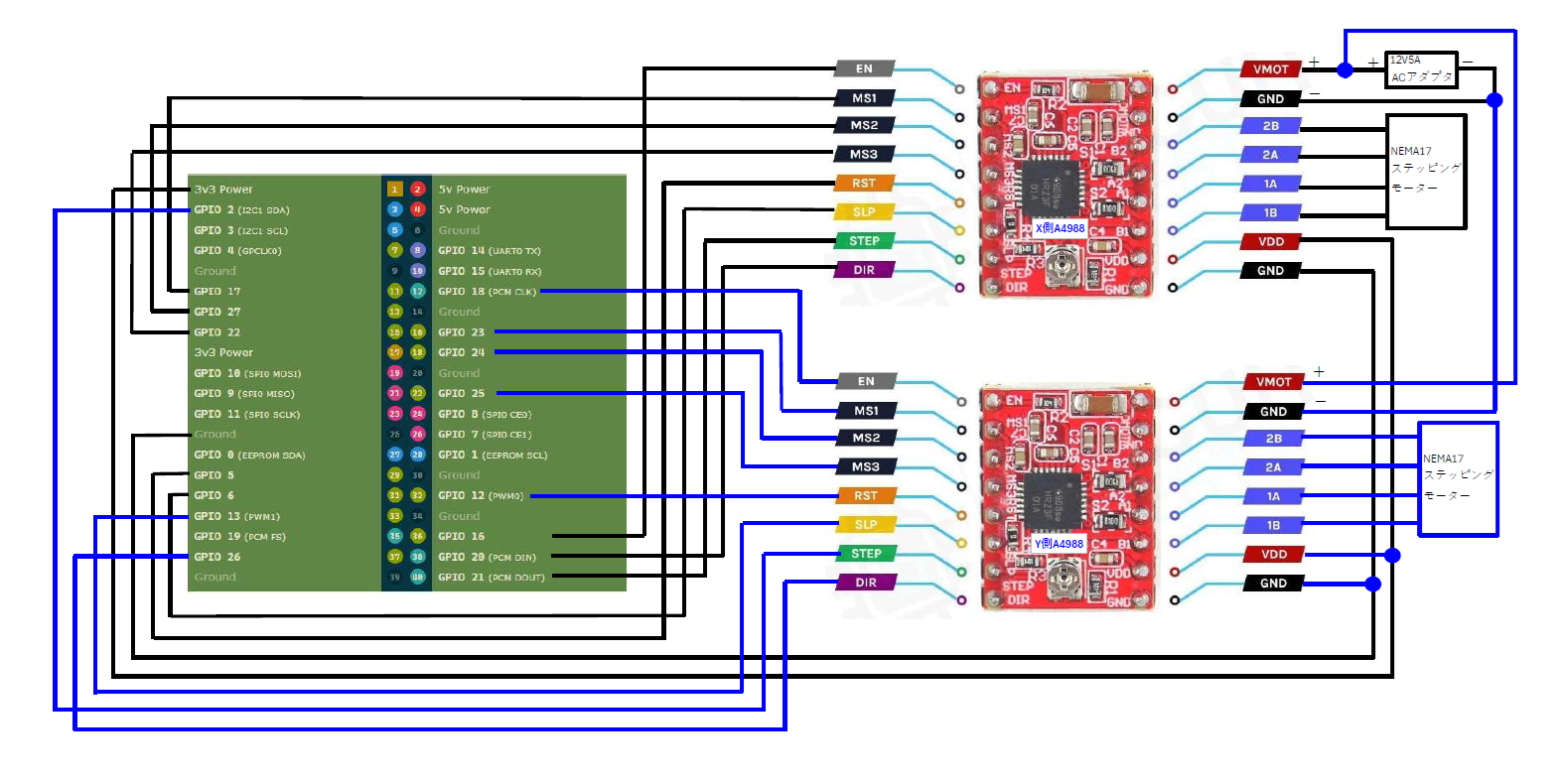
GPIO ピン設定
今回のピン配置です。
X軸
X_STEP = 21
X_DIR = 20
X_EN = 16
X_MS1 = 17
X_MS2 = 27
X_MS3 = 22
X_RESET = 5
X_SLEEP = 6
Y軸
Y_STEP = 2
Y_DIR = 26
Y_EN = 18
Y_MS1 = 23
Y_MS2 = 24
Y_MS3 = 25
Y_RESET = 12
Y_SLEEP = 13
■ハードウェアを結線する際にあると便利なツール

Pythonで同時制御する方法
Pythonでは
threading
という機能を使うと
複数の処理を同時に動かす
ことができます。
今回のプログラムでは
X軸スレッド
Y軸スレッド
を同時に起動します。
Pythonコード
import RPi.GPIO as GPIO
import time
import threading
GPIO.setmode(GPIO.BCM)
# -------------------------
# X軸
# -------------------------
X_STEP = 21
X_DIR = 20
X_EN = 16
X_MS1 = 17
X_MS2 = 27
X_MS3 = 22
X_RESET = 5
X_SLEEP = 6
# -------------------------
# Y軸
# -------------------------
Y_STEP = 2
Y_DIR = 26
Y_EN = 18
Y_MS1 = 23
Y_MS2 = 24
Y_MS3 = 25
Y_RESET = 12
Y_SLEEP = 13
# -------------------------
# モーション設定
# -------------------------
BELT_PITCH = 2.0
PULLEY_TEETH = 32
MM_PER_REV = BELT_PITCH * PULLEY_TEETH
FULL_STEPS = 200
MICROSTEP = 16
STEPS_PER_REV = FULL_STEPS * MICROSTEP
STEPS_PER_MM = STEPS_PER_REV / MM_PER_REV
ACC_DEC_STEPS = 100
# -------------------------
# GPIO初期化
# -------------------------
def gpio_init_axis(STEP, DIR, EN, MS1, MS2, MS3, RESET, SLEEP):
pins = [STEP, DIR, EN, MS1, MS2, MS3, RESET, SLEEP]
for p in pins:
GPIO.setup(p, GPIO.OUT)
GPIO.output(RESET, GPIO.HIGH)
GPIO.output(SLEEP, GPIO.HIGH)
GPIO.output(MS1, GPIO.HIGH)
GPIO.output(MS2, GPIO.HIGH)
GPIO.output(MS3, GPIO.HIGH)
GPIO.output(EN, GPIO.LOW)
# -------------------------
# 加減速計算
# -------------------------
def get_intervals(total_steps, acc_steps, total_time):
const_steps = max(total_steps - acc_steps*2, 1)
total_ratio = acc_steps*0.5 + const_steps + acc_steps*0.5
base_interval = total_time / total_ratio / 2
intervals = []
for i in range(acc_steps):
intervals.append(base_interval*(acc_steps-i)/acc_steps)
for i in range(const_steps):
intervals.append(base_interval)
for i in range(acc_steps):
intervals.append(base_interval*(i+1)/acc_steps)
return intervals
# -------------------------
# モーター制御
# -------------------------
def run_motor(axis_name,
STEP, DIR, EN,
MS1, MS2, MS3,
RESET, SLEEP,
distance_mm, cycles):
print(axis_name,"開始")
gpio_init_axis(STEP,DIR,EN,MS1,MS2,MS3,RESET,SLEEP)
steps = int(distance_mm * STEPS_PER_MM)
intervals = get_intervals(steps, ACC_DEC_STEPS, 1.5) # 1.5秒で加減速込みの移動を完了させる
for c in range(cycles):
# 正転
if axis_name == "X軸":
GPIO.output(DIR,GPIO.LOW)
else:
GPIO.output(DIR,GPIO.HIGH)
for t in intervals:
GPIO.output(STEP,GPIO.HIGH)
time.sleep(t)
GPIO.output(STEP,GPIO.LOW)
time.sleep(t)
# 逆転
if axis_name == "X軸":
GPIO.output(DIR,GPIO.HIGH)
else:
GPIO.output(DIR,GPIO.LOW)
for t in intervals:
GPIO.output(STEP,GPIO.HIGH)
time.sleep(t)
GPIO.output(STEP,GPIO.LOW)
time.sleep(t)
GPIO.output(EN,GPIO.HIGH)
print(axis_name,"終了")
# -------------------------
# XY同時スタート
# -------------------------
def start_both():
x_dist = 60 # 移動距離(mm)
x_cycle = 1 # 移動回数
y_dist = 30 # 移動距離(mm)#
y_cycle = 2 # 移動回数
tx = threading.Thread(
target=run_motor,
args=("X軸",
X_STEP, X_DIR, X_EN,
X_MS1, X_MS2, X_MS3,
X_RESET, X_SLEEP,
x_dist, x_cycle)
)
ty = threading.Thread(
target=run_motor,
args=("Y軸",
Y_STEP, Y_DIR, Y_EN,
Y_MS1, Y_MS2, Y_MS3,
Y_RESET, Y_SLEEP,
y_dist, y_cycle)
)
tx.start()
ty.start()
tx.join()
ty.join()
# -------------------------
# 実行
# -------------------------
try:
start_both()
finally:
GPIO.cleanup()
実行方法
Raspberry Piで以下を実行します。
python3 XY_both_move.py
すると
X軸 → 50mm
Y軸 → 30mm
が同時に動作します。
次回予告
次回はいよいよ
XYテーブルの安全制御
を実装します。
具体的には
- リミットスイッチ
- 原点復帰(Homing)
- 移動範囲制限
を追加します。
これにより
実用レベルのXYテーブル制御
に近づきます。
過去のXYテーブル製作シリーズはこちらから
- 【第0回】Raspberry PiのOSインストール完全ガイド|初心者向けにゼロから解説
- 【第1回】PythonでLEDを光らせる|GPIOの基本をやさしく解説
- 【第2回】ラズパイ+A4988でステッピングモーターを回す
- 【第3回】ステッピングモーターをmm単位で動かす|ベルト駆動の計算方法まで解説
- 【第1.5回】 A4988のVref調整手順(XYテーブル製作シリーズ)
- 【番外編】L6470が動かない?A4988と同じ感覚で使ってハマった話
- 【第4回】XYテーブル化の第一歩|X軸とY軸を2台動かす
- 【第5回】Pythonでステッピングモーターの加減速制御を実装する
- 【第6回】Pythonでステッピングモーターを2軸同時に動かす
- 【第7回】Raspberry PiでXYテーブル制御|リミットスイッチと原点復帰(Homing)の実装
- 【第8回】【Python × Raspberry Pi】XYテーブルをGUI操作する(Tkinter)
コメント